正如我们反复提到过的,伺服是一种为机电设备所需的运动操作提供控制的动力传动装置,因此,伺服系统的设计选型,其实就是给设备的机电运动控制系统选择合适的动力和控制组件的过程,它所涉及到的产品主要包括:
用于对系统中各轴运动姿态进行控制的自动化控制器;
将电压、频率固定的交流或直流电转换为伺服电机所需的受控动力电源的伺服驱动器;
把驱动器输出的交变电源转换为机械能的伺服电机;
将机械动能传递到最终负载的机械传动机构;
…
考虑到市面上工业类伺服产品的门派系列有很多,在进入到具体的产品选型之前,我们首先还是有必要根据已经了解到的设备运动控制应用的基本需求,对包括控制器、驱动器、电机和减速机…等在内的伺服产品进行比较初步的筛选。
这种筛选,一方面是基于设备的行业属性、应用习惯和功能特点从众多品牌中找出一些潜在可用的产品系列及方案组合。比如:风电变桨应用中的伺服主要是桨叶角度的位置控制,但其所使用的产品却需能适应严苛恶劣的工作环境;印刷设备中的伺服应用以多轴之间的相位同步控制为主,同时会比较倾向于使用具备高精度套准功能的运动控制系统;轮胎设备更注重多种混合运动控制与通用自动化系统的综合应用;塑机设备则会要求系统为产品加工过程中的扭矩和位置控制提供专门的功能选项和参数算法…。
另一方面,则是从设备定位的角度出发,根据设备的性能级别与经济性要求,在各品牌中选择相应档位的产品系列。比如:如果对设备性能没有太高的要求,同时又希望能节省预算,则可选用经济款产品;反之,如果对设备运行在精度、速度、动态响应…等方面的性能要求较高,那么自然是有必要为之增加预算投入的。
此外,还需要兼顾包括温湿度、粉尘、防护等级、散热条件、用电标准、安全级别以及与现有产线/系统的兼容性…等方面的应用环境因素。
可见,对运动控制产品的初选很大程度还是以各品牌系列在行业内的业绩表现为基础的,同时,应用需求的迭代升级、新品牌、新产品的入局,也会对其产生一定影响。因此,要做好运动控制系统的设计选型,日常的行业技术信息储备还是十分有必要的。
在对可用的品牌系列进行初步筛选后,我们就可以针对它们进一步展开运动控制系统的设计选型工作了。
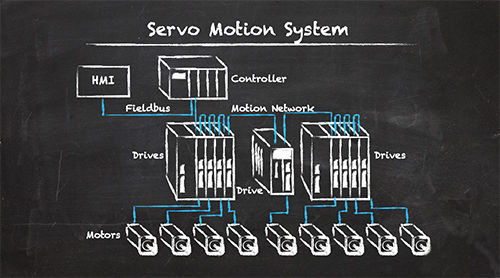
此时,需要根据设备中的运动轴数和功能动作的复杂程度,确定系统的控制平台和整体架构。一般来说,轴数决定了系统规模的大小,轴数越多,对于控制器容量的要求也就是越高,同时也越是有必要在系统中使用总线技术,以简化和减少控制器与驱动器之间线路连接的数量。而运动功能的复杂程度,则会影响控制器性能等级和总线类型的选择。简单的实时性要求不高的速度和位置控制只需要使用普通的自动化控制器和现场总线;多轴之间的高性能实时同步(如电子齿轮和电子凸轮),则要求控制器和现场总线都具备高精度的时钟同步功能,也就是需要使用能够进行实时运动控制的控制器和工业总线;而如果设备需要完成多轴之间的平面或空间插补甚至集成机器人控制,那么对于控制器性能等级的要求就更高了。
基于上述原则,我们基本上已经能够从前面初选出来产品中选出可用的控制器,并将它们落实到比较具体的型号了;再依据现场总线的兼容性,便可从中挑选出可与之匹配的驱动器及对应的伺服电机的选项,但这还只是停留在产品系列的阶段。接下来,我们就需要根据系统的动力需求来进一步确定驱动器和电机的具体型号了。

按照应用需求中各轴的负载惯量和运动曲线,通过简单的物理学公式 F = m · a 或者 T = J · α,不难计算出它们在运动周期中各时间点的扭矩需求。我们可以将各运动轴在负载端的扭矩和速度需求按照预设的传动比折算到电机侧,并在此基础上加以适当的裕量,逐一推算出驱动器和电机的型号,快速拟定系统草案,以便在之后进入大量细致繁琐的选型工作前预先对备选产品系列进行性价比的评估,从而缩减备选方案的数量。
不过,我们并不能将这个由负载扭矩、转速需求和预设传动比预估出来的配置作为动力系统的最终方案。因为,电机的扭矩和速度需求是会受到动力系统的机械传动方式及其速比关系的影响的;同时,电机自身惯量对于传动系统来说也是负载的一部分,电机在设备运行过程中所驱动的是包括负载、传动机构和自身惯量在内的整个传动系统。
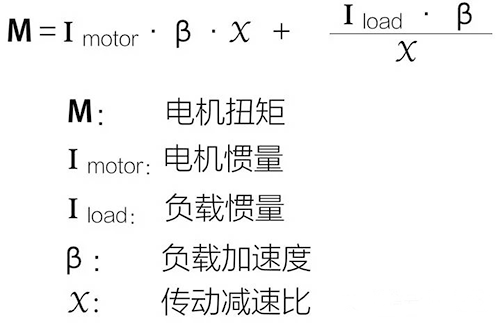
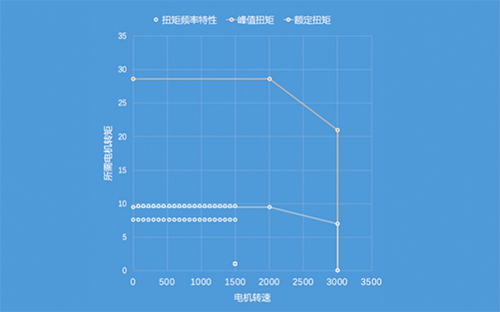
从这个意义上说,伺服动力系统的选型,并非仅仅是根据各运动轴的扭矩和转速…等传动参数的计算去选取电机和驱动器(充其量可称作估算吧),而是要为系统中的每个运动轴匹配合适的动力装置。原则上它其实是基于负载的质量/惯量、运行曲线、以及可能的机械传动模型,将各款备选电机的惯量值与驱动参数(矩频特性)代入其中,比较其扭矩(或力)与速度在特性曲线中的占用情况,找到最优组合的过程。大体来说,需要经历以下几个步骤阶段:
基于各种传动方式选项,将负载与各机械传动组件的速度曲线和惯量映射到电机侧;
将各备选电机的惯量与映射到电机侧的负载与传动机构的惯量叠加,结合电机侧速度曲线得出扭矩需求曲线;
比较各种情况下的电机速度扭矩曲线的占比和惯量匹配情况,找到驱动器、电机、传动方式和速比的最优组合
早前“选型的姿势”一文所描述的其实就是这样一个动力系统匹配的流程。
由于上面这几个阶段的工作是需要针对系统中的每个轴展开的,因此,伺服产品的动力选型工作量其实是非常巨大的,运动控制系统设计的绝大部分时间通常都会消耗在此处。前面提到要通过扭矩需求预估型号,以减少备选方案数量,其意义也就在于此。
而在完成这部分工作之后,我们还应根据需要确定驱动器和电机的一些重要的辅助选项才能最终确定它们的型号,这些辅助选项包括:
如果选用了共直流母线型驱动,需根据柜体分布情况确定整流单元、滤波器、电抗器和直流母线连接组件(如:母线背板)的型号;
根据需要为某个(些)轴或整个驱动系统配备制动电阻或再生制动单元;
旋转电机的输出轴是键槽还是光轴,是否带抱闸;
直线电机需根据行程长度确定定子模块的数量;
伺服反馈协议及分辨率,增量还是绝对,单圈还是多圈;
…
至此,我们就已经将各备选品牌系列在运动控制系统中从控制器到各运动轴伺服驱动器、电机的型号乃至相关机械传动机构的关键参数都确定下来了。
最后,我们还需要为运动控制系统选定一些必要的功能组件,例如:
帮助某个(些)轴或整个系统与其他非伺服运动组件进行同步的辅助(主轴)编码器;
用于实现高速凸轮输入或输出的高速 I/O 模块;
各类电气连接线缆,包括:伺服电机动力电缆、反馈和抱闸电缆、驱动器与控制器之间的总线通讯电缆...;
…
这样,整个设备伺服运动控制系统的选型工作就基本完成了。
总的来说,设备自动化系统中的伺服产品的选型还是一个比较繁琐复杂的过程。尤其是随着目前制造业自动化程度的不断提升,运动控制技术在制造业的应用日趋普及,产线设备中的伺服产品越来愈多,且各项要求也越来越高,这些都让设备运动控制系统的选型变得更具挑战。在这种情况下,引入相应的伺服选型工具就显得十分必要了。当然,这就是另外一个话题了。
咱们后面慢慢聊...